e
Robots That Use Balls to Get Around
James Bruton and Johannes Matsson's omnidirectional mechanisms
British toy designer and engineer James Bruton had this vision, for a unique kind of motorbike:

He worked out, in CAD, how it could possibly operate:
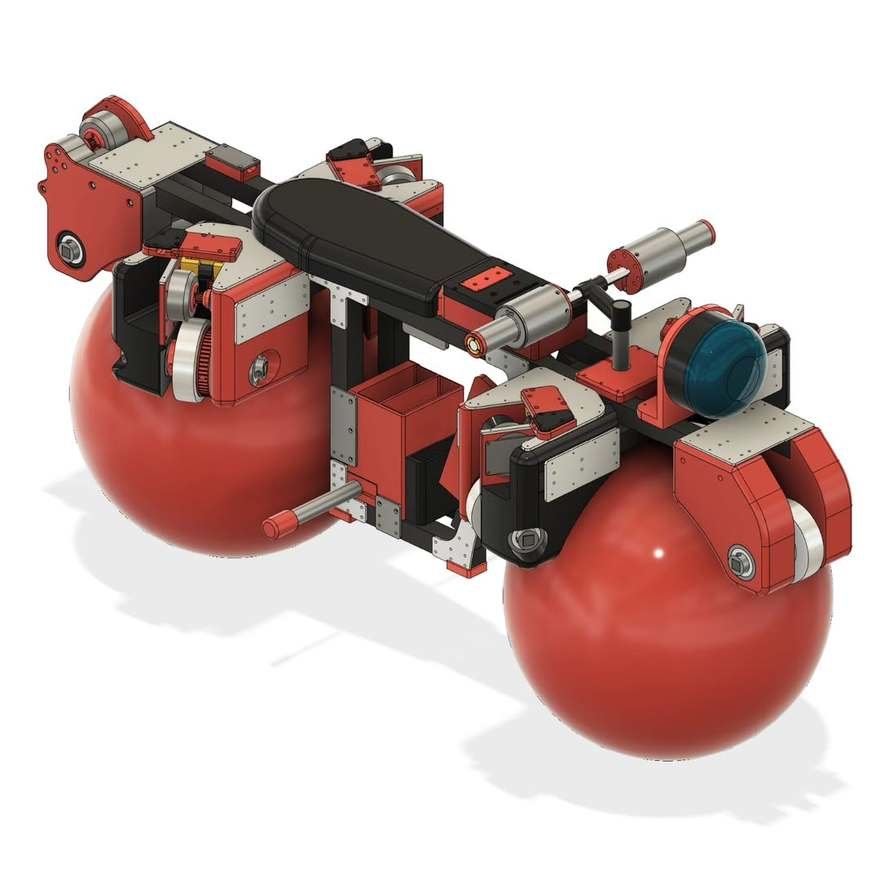
Then he built the darn thing.
"I built an omni-directional ball-wheeled bike. This bike balances like a Segway sideways, and drives in all directions, which makes it the ultimate drift bike! I used five ODrive brushless motors driving omni-directional wheels, running on large plastic balls which are intended for circus acts to balance on. Active control keeps it upright and twist grips are used to drive and steer."
Bruton's work inspired Swedish 3D artist Johannes Matsson, who built a much smaller-scale version to see what it could do:
What I find fascinating about both of these designs, is that they use a commonly-available ball as the tires. It's not difficult to imagine a future where companies sell droids that resemble the upper portions of the two designs above, and the user supplies a basketball or soccer ball as the riding platform.
-
o4Favorite This
-
Q4Comment
Directory Company Profiles
Core77
Industrial Design
Resources
Industrial Design
Resources
-
Core77 Directory
Find the Best Industrial Design CompaniesGo -
Hatch Duo, LLC
Founded by an award-winning team with over 20 years of combined product design experience, Hatch Duo...
-
ECCO Design
ECCO Design is a full service product design and innovation firm. We are a team of designers, resear...
-
andesignlab
ANDESIGN is an industrial design consultancy based in Orange County California and Austin Texas. AN...
-
DesignStein Studios, LLC
We are a team of industrial designers focused on developing products that are intended for tooling a...
-
Bluemap Design
BlueMap design is a multi-disciplinary product development firm. Founded by Simon Yan in 2001, the f...
-
Fahrenheit Design
Fahrenheit is an award-winning product design and innovation firm based in Austin, Texas. Since 2002...
-
RMT PRODUCTS LIMITED.
RMT PRODUCTS CO. , LTD. provide on-time delivery, high-quality prototyping and manufacturing . It i...
K
{Welcome
Create a Core77 Account
Already have an account? Sign In
By creating a Core77 account you confirm that you accept the Terms of Use
K
Reset Password
Please enter your email and we will send an email to reset your password.
Comments
I share Ryan's concern - I wouldn't want to ride that bike on a road with potholes and speed bumps!
Some work will be needed to allow the control software to mimic lean angles in turns as motorcycles use.
Well, Core77, that video isn't of something 'built', it's a Cinema 4D animation, which takes the edge off it for me. I loved the ball-bike though; I assume the CGI one is also feasible, I look forward to seeing someone actually build it IRL. And then maybe fine something useful to do with it..?
I think the concept would be more broadly practical if the ball wheel (let's call them "beels", fun new word for everybody) was captive in the roller frame rather than having the drive unit/carrier resting loosely on top of them.